

2011年3月份大地震引发的海啸重创日本福岛核电站后,日本政府曾考虑派机器人首先进入核电站进行检测、评估损失以及进行可能的修复工作。但是机器人未能完成任务,最终人类不得不承担大部分危险工作。
自那以后,美国国防部下属的国防高等研究计划署(DARPA)就致力于打造更强大的机器人。现在,DARPA举行全球机器人设计大赛,研发那些能在核事故、地震以及海啸等危险情况下执行救援任务的机器人。
这些机器人需要测试开门、打开阀门、连接软管、使用手头工具切割嵌板、驾驶汽车、打扫垃圾、爬楼梯等任务。对于人类来说,这些任务非常简单,但对机器人来说却非常困难。
今年,全球25家最顶级的机器人研发机构将参加于
要想取得参加DARPA机器人挑战赛决赛资格,各队必须证明他们的机器人可以执行紧急切断开关、俯卧位站立、行走
DARPA希望竞赛中涌现出的技术可以给机器人领域带来改变,促进机器人在任务层面的自主发展,可在灾区的危险环境中执行任务等。以下是进入决赛的25支参赛队伍中最令人印象深刻的5大机器人:
▼ CHIMP
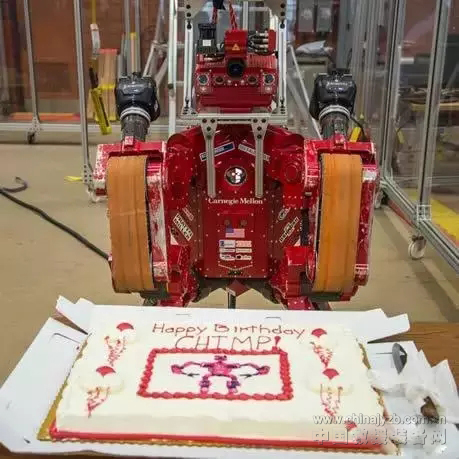
CHIMP 由美国卡内基·梅隆大学下属国家机器人工程中心的Tartan救援团队设计,体积与人类大小相当,拥有四肢。当其站立时,身高为157厘米,体重180公 斤。CHIMP不属于步行机器人,而是拥有类似坦克的履带。当需要执行操作电动工具、旋转阀门或其他使用手臂的任务时,CHIMP可以直立起来,通过履带 滚动前进。CHIMP的臂展可达
▼ Momaro

Momaro 是由德国波恩大学下属NimbRo救援团队按照DARPA机器人挑战赛要求特别设计的。它是一种半类人机器人,身体上半部安装在灵活的混合移动基座上。 Momaro有4条腿,有导向轮直接驱动。这可令它在崎岖不平的地形中全方位移动,也可以调节上半身的高度。为了克服更大的障碍物或攀爬楼梯,它的腿可抬 起来迈步行进。
Momaro的上半身有两个成人大小、七自由度的拟人手臂。它还有四个 可单独控制的手指,每个有2个指节。它的上半身可扭曲延展,以扩大控制空间。Momaro的头几乎由传感器组成,包括可持续旋转的3D激光扫描仪(可产生 球状视野)、8个全方位视场的彩色照相机、3部全景高清彩色摄像机以及广角摄像机组成。此外,这个机器人还可以感知关节位置和力矩,装备有惯性测量单元。
▼ Walkman

Walkman 是意大利技术学院与比萨大学联合研发的类人机器人。Walkman项目获得欧洲资助,它从2014年开始,历时4年,目的是研发灾难救援类人机器人。 Walkman的原型与人类体形差不多,身高
Walkman的感知系统包括传感器、配备立体视觉系统和旋转3D激光扫描仪的头部模块。此外,安装在固定方向的彩色相机也可为其提供更大的视觉覆盖范围和操作空间。覆盖全身的保护软套可令Walkman承受住下坠影响。
▼ Helios
Helios 的大部分软件都是美国麻省理工学院开发的,他们还创造出可了解机器人物理极限的工具,允许人类操作者评估未来机器人行为,以验证其安全性。这套系统的核心 部分是逆运动学引擎(IK),它可计算机器人的关节角度以便完成现实目标,比如在空中定位机器人的手、保持机器人平衡、避免与其他物体碰撞等。
麻省理工学院团队还开发出新的脚步算法,比如IRIS算法,可以计算凹状安全区域的地形。机器人的平衡、行走、动作都可由控制者完成。该团队还开发出估算工 具,可将机器人关节位置传感器、机载加速度计和陀螺仪以及激光测距仪等方面信息整合,确定机器人的状态和精确度,评估可重复落脚的位置,甚至允许机器人无 需与地面进行任何接触的情况下准确地跟踪自己的状态。定制的用户界面可从机器人状态评估、激光扫描仪、机载照相机以及力量传感器等集成信息,向人类操作员 详细信息。
▼ Thormang 2

Thormang 2是韩国Robotis Ltd研发类人机器人,身高160厘米,体重60公斤。Robotis Ltd曾利用Thormang 1机器人参加DARPA机器人挑战赛,并根据其表现建立了新的团队,与韩国科技大学和韩国机器人协会共同研发机器人。Thormang 2是Thormang 1的升级版,尽管两者身高体重基本相当,但后者更强壮、快速和稳定。模块化是其主要特性。
本文资料来自互联网,由中国救援装备网重新编辑整理。


 闽公网安备 35020302033328号
闽公网安备 35020302033328号 救援装备网客服微信号
救援装备网客服微信号