
为了实现应急救援装备的智能化,相关共性技术需要被突破,主要涉及智能环境感知技术、智能运动控制及导航技术、自学习技术、人机交互技术以及网络协同技术。
2.1 智能环境感知技术
智能救援装备在工作过程中主要通过传感器来获取环境信息并搜寻幸存人员。由于灾难现场一般具有复杂性和不确定性,室内结构化环境中传统的环境感知算法不能满足救援工作的需求,例如,传统的激光测距仪及声呐等仪器在充满烟雾和灰尘的环境中也很难以发挥作用。
因此,传感检测识别技术和多传感信息融合技术需要被研究。例如,BAUM等考虑到由于灾害现场浓烟、碎片和非结构化地形导致机器人很难在能见度很低的条件下工作的问题,开发了一种音频分类算法,用于识别与消防相关的声音,如遇险人员(婴儿哭声、尖叫声、咳嗽声)、结构故障(木材折断、玻璃破碎)、消防车和人群等。
该方法从音频记录中提取出一系列特征,并通过前馈神经网络进行分类。该网络结构简单,可在有限的硬件上实现性能,分类结果总体精度达到 85.7%。
钟煜华对救援机器人在城市搜救任务下基于三维激光雷达的环境感知问题进行了一系列研究,主要包括机器人实时同步定位与建图、实时地形分类及可通行区域识别等问题,试验结果表明,该分析方法具有良好的可行性。
智能的环境感知技术是应急救援装备实现智能化的基础,面向不确定恶劣极端环境下的环境感知技术是智能救援装备未来的研究方向之一。
2.2 智能运动控制及导航技术
智能运动控制技术可以提高救援装备的运动精度和任务完成的可靠性。例如,为了提高灭火机器人喷嘴的控制精度,美国 MCNEIL 等提出了一种基于视觉的喷水方向控制算法。通过摄像头辨别目标位置,并采用线性最小二乘优化的方法确定每个采样时间喷嘴的最佳俯仰角。
在此基础上,采用卡尔曼滤波方法去除测量中的干扰因素,从而更好地确定当前喷嘴的方位。试验表明,机器人可实时调整喷嘴的姿态,实现更加准确的灭火,并具有纠错功能。
在智能导航方面,移动装备导航的本质是在一定的约束条件下,找到一条可顺利到达终点的路径。
例如,马来西亚的 SAUDI 等采用拉普拉斯方程来求解机器人路径规划算法中的势函数,并通过依次迭代的方法求解复杂方程的数值解。目前该方法应用得还不多,但良好的适应性和灵活性使其在救援机器人路径规划领域拥有很大的应用前景。
智能的运动控制和导航技术可以使得救援装备极大地摆脱人的干预,实现智能的、自主的运动,是应急救援装备的共性技术之一,研究的重点体现在极端环境下运动的准确性等方面。
2.3 自学习技术
灾难废墟环境的不确定性使得救援机器人的运动能力与救援需求不符。需要利用有限的轨迹样本进行自学习,使得机器人在崎岖地形下具有自适应能力。
救援装备的自学习主要包括建模、在线运行和自主学习三个阶段。建模即对于对象的输入量和输出量进行比较,找出其中的运算关系,得出所描述的模型;在线运行即对此模型不断地进行在线修改,减少模型算法与实时数据的差异性;自主学习即进行预测评估,并做出相应的在线参数自校正。
例如,日本的 HITOMI 等针对救援机器人提出了一种强化自学习方法。通过模拟发现,经过 1 000 个周期,机器人可快速完成自学习,同时所得的控制器不受斜坡梯度和突发扰动变化的影响。上述研究虽然达到了良好的自学习效果,但忽略了机器人的能耗问题。
为解决该问题,中国广东工业大学的王丽杨等针对救援机器人提出了一种高能效的自学习控制系统。在机器人运动过程中考虑每个训练样本的能耗,并根据样本能耗对样本进行加权学习。同时所提出的自学习目标函数中含有与能耗有关的松弛因子,即训练过程更重视能耗较低的样本。
救援机器人的自学习是一个长时间的训练过程,目前大部分机器人学习算法都是基于仿真的离线算法。因此如何利用引入相关先验知识、算法改进、学习模式改进等方法来加速自学习过程,并实现针对实际救援情况的自学习,是一个亟待解决的问题。
2.4 人机交互技术
救援装备的人机交互是指通过计算机输入输出设备实现人与救援装备对话的技术。人机交互技术旨在协调人与救援设备之间的关系,消除两个智能系统之间的通信及对话边界,使人与救援设备之间可以更方便、顺畅地进行信息交流。
在复杂的灾难现场,救援人员可通过有线或无线的方式遥控搜救机器人。操作者需要根据人机交互系统提供的大量数据和信息,有效地对机器人本身及其所携带的有关装置进行控制。此时,操作者一般精神高度紧张且需要长时间连续高负荷工作。因此,良好的人机交互系统可在提高救援效率的同时减轻救援人员的工作强度。
在救援机器人的人机交互系统中,最理想的交互方式是自然语言交互,主要研究如何使机器人理解人类语言,并且将人类语言转换为机器人可以执行的指令。例如,斯里兰卡的 PYLASINGHE 等针对自然语言中存在的模糊表达的问题,提出了一种使用口头语音命令控制机器人的人机交互方式。主要采用神经网络建立了分类器,从而对人机交互中的模糊语义进行定义,并在试验中可以通过语言控制的方式完成对运动路径的预测。
因此,如何实现人机高效、友好的交互,是智能应急救援装备研究中的一个富有挑战性的领域。
2.5 网络协同技术
某些自然灾害受灾范围广,成灾频率高,对国民经济造成极大威胁。灾害发生后,需要准确、快速、高效地将应急救援装备送达灾区,以减少人员损失,加速灾区重建。因此,救援装备的调度问题受到多数研究学者的关注。
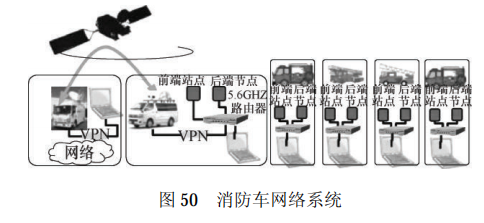
例如,为了提高消防车辆的利用效率,科研人员对调度的优化算法进行了研究。BELVAL 等考虑到季节性对区域资源分配的影响,提出了一种新的物流模型,以根据不同影响因素实现消防车的快速调配。OWADA等提出了一种新的通信系统,该系统由多接口移动自组网路由器和车载天线组成,为消防队赶往救援现场提供实时的道路信息。网络搭建方案如图 50 所示。然而,由于救援装备种类繁多,且救援现场时间紧迫、任务繁重、救援装备智能化程度不高,如何实现不同智能救援装备的网络协同是面临的技术挑战。
相关文章:
智能应急救援装备趋势:空中救援装备 智能应急救援装备趋势:通信装备



 闽公网安备 35020302033328号
闽公网安备 35020302033328号 救援装备网客服微信号
救援装备网客服微信号