
摘要: 破坏性地震往往会造成大量人员被掩埋在建筑废墟内,因此,被困人员的搜索救援是地震现场应急工作的重要任务。地震现场的搜索效率直接关系到地震救援工作的成功率,是提高被困人员生命存活率的重要因素。但是,强震发生后,地震现场往往余震频发、废墟内环境危险而又复杂,这些都给救援人员带来了极大的困难,也威胁着救援人员的生命安全。结合当前快速发展的搜救机器人技术研究现状以及地震应急救援中遇到的实际问题,提出了地震救援装备机器人化的研究设想,目的是提出地震救援人员对辅助搜索救援机器人的实际需求。同时介绍了中国地震应急搜救中心与国内多家院所合作完成的地震现场搜索救援机器人系列的研究现状,并分析了其优势与不足。所做的工作可为提高现场搜索救援效率,以及地震救援机器人的进一步研发与产业化参考。
关键词: 震害现场; 救援装备; 废墟搜索; 救援机器人
全球范围的地震灾害不断频发,给当前的现场救援技术带来了巨大的挑战。尤其是在破坏性地震发生后,作为专业的地震救援工作者,如何用科学的救援方法、先进的技术装备去营救幸存者,使损失降到最低限度,是我们的首要任务。但是极端恶劣的现场救援环境,如频发的余震、狭小的缝隙、危险建筑废墟、甚至是有毒环境、辐射环境等,将极大地影响救援的效率和效果,甚至常常威胁救援工作人员的生命安全。随着机器人技术的不断成熟以及其它灾害救援机器人的快速发展,给我们的地震救援机器人化改进工作带来了巨大的推动作用。
从最早的火灾救援机器人的研制与应用,到美国“9. 11”恐怖袭击事件中,救援机器人成功的在世贸中心的废墟进行搜索救援,再到“3. 11”日本地震中,搜索定位机器人以及核事故处理机器人的应用,使我们看到了机器人救援的必要性和可行性,本文介绍了中国地震搜救中心与中国科学院沈阳自动化研究所、上海大学在“863”计划十一五重点项目的支持下,共同研制和开发了地震废墟搜索与辅助救援系列机器人样机,同时针对机器人样机在国家地震紧急救援训练基地模拟地震废墟环境下开展功能测试和实验的相关数据进行了分析,初步验证了我国自主研发的搜索与辅助救援机器人的可靠性,同时分析了不足和亟待改进之处。这对加快地震救援装备的智能化、提高地震救援装备的技术水平、推进救援机器人产业化具有十分重要的现实意义。
1 地震应急搜救中遇到的困难
大地震发生后,国家及各省市地震灾害应急救援队、各地消防救援队以及其他特殊行业的救援队都肩负着国家和人民的重要希望,在地震灾区全力以赴地进行着被困群众的搜索救援工作。以“5. 12”地震为例,我国投入救援的总人数约17 万人,其中解放军和武警部队共约13. 7 万人,矿山、危化救援队约4000 人,消防与地震专业救援队1. 8 万人,其中国内专业救援队96 支,国际救援队8 支,共计成功救援1. 7 万人。在取得地震救援的巨大成功的同时,我们也面临着很多困难和亟待改进之处。
首先是救援时间的急迫性。根据黄金72 h 的救援原则,为了保证被困者生存获救几率,地震救援工作者必须实现快速响应与有效的救援,这就要求救援队员在短时间内完成大量的废墟搜索救援工作,这给救援队员的体力和精神上带来了极大的考验,很多地震现场工作者都有着24 h,甚至72 h 的连续工作经历,即便是休息也是十分短暂的,因此过度疲劳,难免带来工作效率的下降、威胁队员们的身体健康甚至生命。
其次是废墟环境的危险性。地震废墟是一个极不稳定的结构类型,加之随后时刻可能有余震发生,使其具有二次甚至多次倒塌的危险性,这时刻威胁救援队员的生命安全。尤其是破坏性地震有可能造成危化工厂等建筑的破坏,大量的核化污染也同样威胁着救援队员的健康与安全。
再次是狭小的救援空间。如图1( a) 所示,由于被困者往往被掩埋在复杂的倒塌结构下,救援队员很难通过狭小的倒塌缝隙,而且为了不引起人为的二次倒塌,常常要放弃重型设备,而通过小型破拆工具,打开救援通道,对被困者实施救援,这给救援工作带来一定的困难。
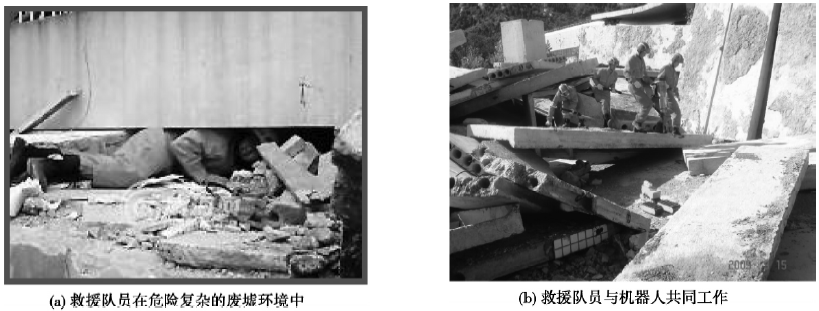
图1 地震废墟的搜索救援行动
最后是搜索救援装备亟待国产化。目前国家地震救援队装备,尤其搜索设备,主要依靠国外进口。虽然进口设备的功能完善,技术先进。但是由于其检测与维修都需要到国外处理,这给我们的日常维护和应急都带来了困难,尤其是现场救援过程中的维护和修理,一旦在救援过程中损坏便不能及时修理。
综上所述,地震救援是一项时间紧迫、危险度高、异常复杂的工作。因此我们开始了国产化地震废墟搜索与辅助救援系列机器人的研制,该系列机器人可以代替救援队员在废墟内进行被困人员搜索定位,尤其是在某些危化场地的救援。同时机器人体积小,可以穿过人类不能通过的狭小缝隙; 机动性强,在废墟环境中快速行进; 而且可以不分昼夜的连续工作,可以解放大量救援队员从事专职的救援工作。
2 地震救援装备机器人化改进
近年来,特别是“9•11”恐怖袭击之后,世界上许多国家都从军事和救援角度,开始了反恐、防化、救援等特种机器人的研发。尤其是以日本、美国和中国等自然灾害频发国家,都投入了大量的人力和物力,根据各自国家的研究特点和灾害类型,进行了具有自主知识产权的救援机器人研发。如日本的东京工业大学、东芝公司、三菱公司等; 美国的加利福尼亚大学、南佛罗里达大学、明尼苏达大学、Foster - Miller 公司等; 中国的中国科学院沈阳自动化所、哈尔滨工业大学、北京理工大学、上海大学等。国际性RobCup 机器人竞赛也增加了RobCup Rescue 专项机器人救援比赛。同时在2005 年在日本神户召开的IEEE SSRR 大会上,各国专家会商提出了: “在今后的减灾和救援中,机器人作为一种有效的手段,将成为社会基础设施中不可缺少的部分。”的研究发展主旨,促进了救援机器人技术在全世界范围的快速研发。尤其是日本“3. 11”地震及海啸引起的核污染灾害,敲响了全世界范围地震搜索救援工作的警钟,地震救援行动如何在有毒或核辐射环境下工作,也成为了研究的热点,地震救援机器人的研制势在必行。
因此,中国地震应急搜救中心结合现有救援过程中遇到的困难,提出了救援装备机器人化改进的方案,并与相关科研单位,共同完成了地震搜索与辅助救援系列机器人的研制。该系列机器人分为空中旋翼搜索救援机器人、废墟表面搜索机器人以及狭小缝隙搜索机器人。可以实现对地震现场的立体化搜索和救援。该系列机器人相对于传统的人工搜索,具有如下优势。
首先,机器人可以通过履带爬行和螺旋桨飞行,其行进速度快于在废墟上行走的救援队员; 其次机器人负重能力强,可以携带多种传感器,实现废墟内,图、声、气、温等多种检测可以更有效的发现被困者的位置;同时机器人的机动性和搬运破拆能力都强于普通人类,而且通过电池补给可以连续工作,提高搜救的效率;最后,机器人救援的形式,提高了救援队员的安全系数,可以避免二次倒塌所带来的伤亡。未来通过机器人的性能与感知能力的不断提高,以及大规模的救援人员操作培训,该系列地震救援机器人便可以大规模投入现有国家地震应急救援队的现场工作中。
3 本系列地震救援机器人的应用效果
救援机器人的研制是一个模块功能集成化的过程。救援机器人具备行动、搜索、识别、通信和控制等多种功能模块,这就需要研发并集成相关的模块并最终搭载如红外、CCD、穿墙雷达等传感模块,形成功能强大的远程遥控机器人化的地震救援装备。
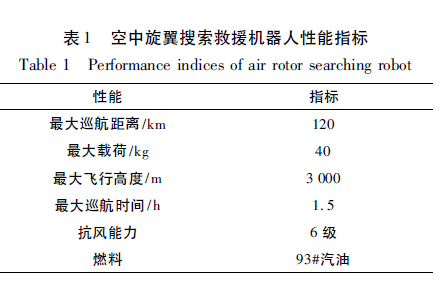
如图2( a) 所示的空中旋翼搜索救援机器人,有效地解决了地震应急救援中,受灾地区灾情信息不能及时准确掌握,以及搜救队员在废墟中和破坏的道路上行进速度缓慢等困难。它可以第一时间飞入地震受灾地区,并通过CCD 摄像头将现场信息回传至救援指挥中心,同时该机器人可以背负40 kg 的食品或药品等应急物资,并可以通过遥控方式投放到制定区域,实现现场补给。尤其是该机器人可以通过GPS 卫星导航,能够实现在恶劣天气以及夜间作业。该机器人具体参数如表1所示:
如图2( b) 所示的废墟表面搜索机器人,采用了履带式设计,可以跨越30°的障碍物楼梯等。该机器人的出现可以替代救援队员在余震频发的情况下,进入危险建筑中,开展被困人员的搜索定位工作。该机器人具备摄像、音频以及气体检测等传感模块,可以将废墟内的影响和声音资料通过无线网络实时地传到废墟外的仪器上,并可以测量废墟内的氧气浓度以及是否存在有害气体等。救援队员只需观察仪器屏幕和通过手柄操作,便可以实现倒塌废墟搜索。这将极大的保证救援队员的生命安全,提高现场救援的效率和准确性。
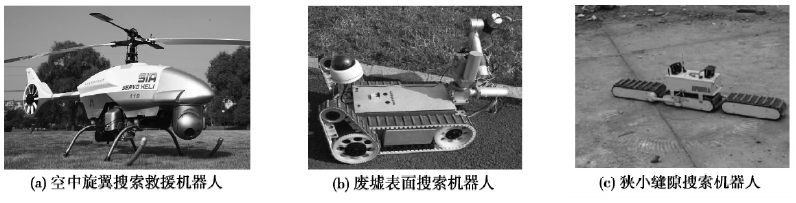
图2 地震搜索机器人实物图
图2( c) 所示的狭小缝隙搜索机器人,同样采用履带式设计,但是不同于废墟表面机器人的是,它的体积更小,而且可以根据缝隙的大小,进行变形,以便更好的通过缝隙。具体变形方式为4 种,分别是三角型、并排型、直线型和D 字型。其中直线型可将3 条履带并为一线,此时机器人宽度仅为20 cm,可以钻入救援队员无法进入的细小缝隙,减少搜索救援的死角,同时可以通过搭载相关的图像或者其他传感模块,将废墟结构的内部信息传给外面操控的救援人员。
4 不足与改进
通过多次废墟环境的搜索救援实验与演练,目前已经实现地震救援机器人的初步设计指标,可以实现在地震废墟中进行搜索和辅助救援的工作,如图1( b) 所示地震搜索救援机器人与救援队员同时工作。但是我们未来仍需不断的改进和完善,让该系列机器人的搜索救援能力更加完善。
首先是无线传输信号的稳定性。地震废墟内环境复杂、障碍物繁多,这些对现有的机器人与操作者点对点无限交互方式,带来了一定阻碍。在进入废墟距离较远且中间障碍物较多时,会出现视频信号的衰减和丢失。
其次是机器人的续航能力。如表面与缝隙机器人都采用的是24 V、
再次现有救援机器人本体结构的优化与改进,如提高机器人的平稳性和通过性,提高机器人在面对废墟复杂路面情况的能力,以及防倾倒等能力; 再如机器人的小型化研究,因为目前的实验废墟环境还是较为理想的试验环境,在实际现场很有可能有更为狭小苛刻的废墟环境,但是尺寸过小,也会影响机器人本身的通过能力和平稳性。
最后是机器人的人机交互技术优化,提高其操控性,尤其是适合对非机器人专业的救援队员的操作。这也是未来该系列地震搜索救援机器人能广泛推广的重要环节。如何让操作方式简便、易学、实现一个良好的交互人机技术是未来研究的关键环节。
5 结语
地震应急救援是当前地震现场工作中的重要环节,它具有时间紧、任务重的特点。地震搜索救援的效率,直接关系着被困群众的生命安全。只有快速、准确地进行地震被困人员的搜索定位,才能提高我们后期救援的成功率。另一方面,随时可能发生的余震,复杂而危险的废墟环境,甚至有害气体等,都给我们的救援工作带来了极大的困难,尤其是威胁着地震救援队员的生命安全。作为地震科研工作者,如何既有效准确地完成废墟的搜索救援,又能尽可能地保证救援工作者的生命安全,成为我们研究的重点。结合国内外应急救援装备的研究趋势,我们提出了应急救援装备机器人化的设想,并与中科院沈阳自动化所和上海大学等科研单位,共同完成了地震搜索救援机器人系列的研制。并通过大量的模拟仿真实验,验证了该系列机器人的可行性与可靠性。但是该系列救援机器人还有待着实际地震救援的考验,尤其是多变复杂的地震现场环境。为此,我们还需要不断地探索和优化: 需要进一步研发远程操控的可靠性; 需要进一步完善人机交互的操作方式; 需要进一步完善机器人本身结构的可靠性等。但是,我们有理由相信,随着机器人技术的不断发展,传感器以及无限通信技术的不断成熟,在不久的将来,我们可以实现单机器人智能废墟搜索,以及水、陆、空多机器人协同地震灾区大面积立体式搜索救援。
本文资料来自《自然灾害学报》 第21卷第5期。


 闽公网安备 35020302033328号
闽公网安备 35020302033328号 救援装备网客服微信号
救援装备网客服微信号